1.引言
在現代化戰爭中,武器系統及其維修保障過程日益復雜,采用分布式仿真實現維修保障過程的可視化和有效管理、提高維修保障仿真效率,顯得越米越重要。與傳統的單個系統仿真相比,分布仿真的關鍵問題是多個仿真系統間的互操作問題,為此,美國國防領域的相關組織通過大量的研究,提出r建模與仿真的.高層體系結構 (High Level Architecture,簡稱HLA ),HLA的核心思想是互操作和重用,其顯著特點是通過運行支撐環境RTI (Run-Time infrastructure)}提供通用的、相對獨立的支撐服務程序,將仿真應用同底層的支撐環境分開,即將具體的仿真功能實現、仿真運行管理和底層通信傳輸=者分離,隱蔽各自的實現細節,從而使各部分可以相對獨立地進行開發,并能充分利用各自領域的先進技術。日前,HLA已成為IEEE建模與仿真標準,因此基于HLA的分布仿真是今后仿真發展的主要方向。
在一個基于HLA的分布交互式仿真系統,聯邦成員是基本的仿真單元。一個聯邦成員需要完成一個相對獨立的仿真任務,并且需要與仿真系統的其自聯邦成員交互通信,以組成一個聯邦,協同完成分步交互式仿真。我們的日標是小僅要構建基于HLA的仿真系統和成員,還要能動態顯示仿真過程和各成員勢態,借助相關的軟件和工具實現仿真成員的一維圖形顯示。
2.基于HLA的團維修保障仿真系統結構及組成
2.1系統想定
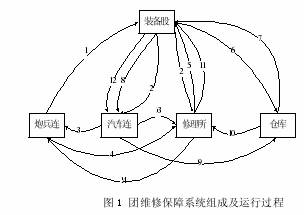
裝備維修保障系統(Maintenance Support System)是經過綜合和優化的維修保障要索構成的總體,是山裝備維修所需的硬件、軟件、人力以及管理組成的復雜系統。其日標是通過采取各項措施和相關的管理活動保持和恢復裝備性能,及時有效的為部隊提供服務。
維修保障系統(圖1)主要III EA(裝備管J}機構)、EOU(裝備使用單位)、RO(修J}機構)、DE(倉庫)、TO(運輸機構)組成,具體過程為:OEOU提出修理請求;OEA 通知修理所;同時EA通知TO運送故障部件;Cs}To派車輛去EOU裝載故障部件;④車輛裝載故障部件去R0; ORO向EA提出器材請求;)EA通知DE準備器材;ODE準備器材完畢通知EA;EA通知TO運送器材;⑨T0派車輛去DE裝載器材;⑩車輛運送器材到 R0; n當④、⑩完成后,RO開始修理,完畢后報告EA; SEA通知TO運送修好的部件;) TO派車輛去RO裝載修好的部件;O車輛運送修好的部件到EOU。
2. 2仿真系統體系結構及組成
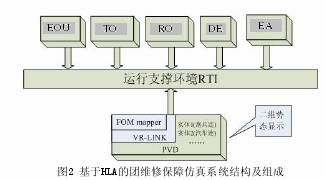
HLA的一個基木思想是將特定仿真,},的功能與通用的支撐服務相分離,聯邦成員通過調用RTI提供的服務進行交互,交互信息基于HLA的公布 /句購機制。團維修保障仿真系統聯邦結構如圖2所示,聯邦,},有裝備股、炮兵連、修理所、倉庫、汽車連5個成員,這些成員的實現都是基于RTI的AP工函數,基本過程為初始化成員數據、創建并加入聯邦、聲明公布/句購關系、確定成員的時間推進策略、注冊對象實例、請求時間推進、進行仿真循環。除此之外,聯邦,},還加入用于一維勢態顯示的NLNK工具PVD CPlan View Display), RTI應用與PVD的交互通過NLNK的VR-Link接日程序來實現,并將聯邦仿真成員轉化為PVD } I,圖形化的實體。仿真系統運行支撐環境為MAK-RTI, FOM/SOM設計采用OMDT(Object Model DevelopmentTool),開發環境為Visual C十十6. 0.
3.聯邦/仿真對象模型設計及FOM映射
3.1 FOM/SOM設計
FOM的主要目的是提供聯邦成員之間以公共的、標準化的格式進行數據交換的規范,自描述丁在仿真運行過程,將參與聯邦信息交換的所有對象類、對象屬性、交互類、交互參數的特性。FONI的所有部件共同建仁丁一個實現聯邦成員之間互操作所必須的“信息模型協議”。SONI是單一聯邦成員的對象模型,‘自描述了聯邦成員以對外公布或需要句購的對象類、對象屬性、交互類、交互參數的特性,這些特性反映了成員在參與聯邦運行時所具有的能力。
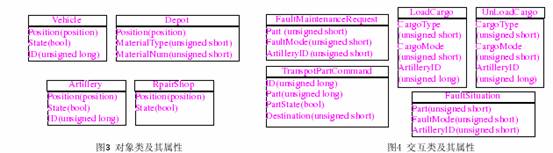
維修保障仿真系統FOM,的對象類包括火炮類Artillery、車輛類Vehicle、修理機構類RepairShop和倉庫類Depot C圖3);交互類主要包括故障維修請求類FaultMaintenance、故障狀況類FaultSituation ,裝載貨物類LoadCargo ,卸載貨物類UnLoadCargo、運輸故障部件命令類TransportFaultPartCommand(圖4)等C III于篇幅所限,這里只列出部分分交互類)。
仿真系統中的SOM有5個,分別是裝備股、炮兵連、修理所、倉庫、汽車連,各SOM的公布(P)和訂購(S)關系如表1所示。
3.2建立 FOM映射
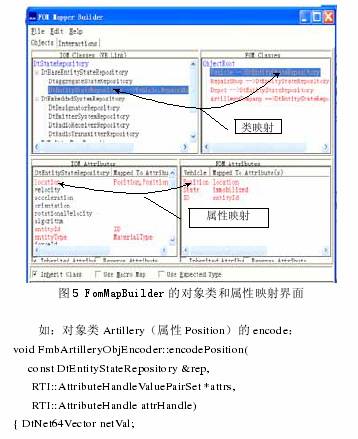
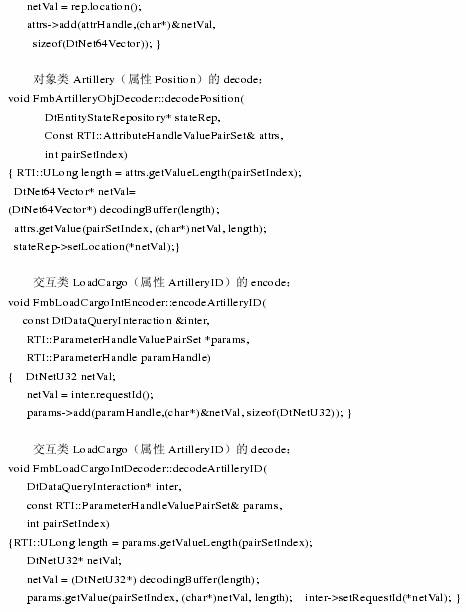
進行FONI映射主要是為f將基于RTI的應用轉化為.y層應用(如一維顯示、數據}o}放、=位場景等),這一工作我們采用NLVK的VR-Link 來實現,VR-Link是針對HLA的獨仁于協議的.高層應用程序接日。‘自提供丁圖形化工具FomMapBuilder(圖5)}習守用戶定義的包含對象類及屬性、交互類及參數的FED(聯邦執行數據)文件,與VR-Link定義的獨}i:于協議的對象類及屬性、交互類及參數進行映射。VR-Link采用丁面向對象的C十十實現,使用FomMapBuilder完成映射后將自動生產FONI映射代碼,代碼,},還包含丁對對象類屬性、交互類參數的編碼 (encode)和解碼(decode),以使RTI信息能被基于VR-Link的.高層應用所識別。
FONI映射的鼓終結果是生成一個共享的動態連接庫(缺省為myFomMapd. dll ),封裝用戶定義的對象類和交互類到
VR-Link定義的對象類和交互類的映射,以被VR-Link接日程序調用。
4.仿真系統的勢態顯示實現
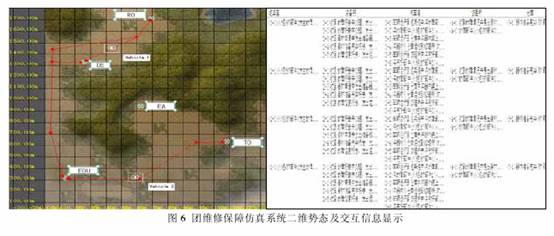
一維勢態顯示主要是將仿真過程及成員以圖形化方式顯示出來,開發工具采用丁NLVK公司的PVD和VR-Link, PVD以實時提供淺場的一維勢態圖,并顯示實體、聚合和傳感器;VR-Link是快速建仁HLA應用、面向對象的C十十工具包,使開發主要集中用于仿真應用而需要考慮網絡協議的細節。圖6為團維修保障仿真系統的一維勢態及交互信息顯示,其實現過程如下:
建立基于HLA的網絡連接;
DtExerciseConn* exConn=0:
char* execName=(char *)"VR-Link";
char* fedName=(char *)"Maintenance";
char* fedFileName=(char *)"VR-Link.fed";
char* fomMapperLib=(char *)"myFomMapd.dll";
char* fomMapperInitData=(char *)"' ,
double rprFomVersion=1.0:
char* fedFileToUse=0:
exConn=new DtExerciseConn( execName, fedName,
new DtRprFomMapper( rprFomVersion).fedFileToUse. 0):